آموزش ها
آموزش نحوه کنترل PID با پی ال سی اوتاز
در سیستمهای صنعتی و اتوماسیون، کنترل دقیق و پایدار فرآیندها اهمیت بالایی دارد. یکی از رایجترین روشهای کنترل خودکار، استفاده از کنترل کننده های PID (تناسبی-انتگرالی-مشتقی) است. این کنترلکنندهها نقش مهمی در تنظیم متغیرهای مختلف مانند دما، فشار، جریان و سطح در سیستمهای صنعتی ایفا میکنند. در این مقاله، با نحوه پیادهسازی کنترل PID در پی ال سی های اوتاز آشنا میشوید و به بررسی گامهای کلیدی برای تنظیم صحیح این کنترلکننده جهت بهبود کارایی فرآیندها میپردازیم.
کنترل کننده های PID
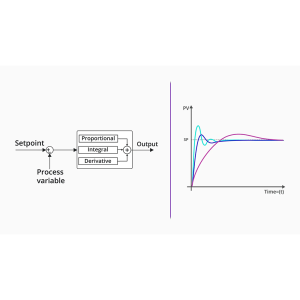
کنترل PID، یا کنترل تناسبی-انتگرالی-مشتقی، یک سیستم کنترل فیدبک است که بهطور گسترده در کاربردهای صنعتی و مهندسی استفاده میشود. این سیستم به حفظ خروجی مطلوب کمک میکند و با تنظیم ورودی های کنترل بر اساس اختلاف بین نقطه تنظیم شده (Setpoint) و خروجی واقعی عمل میکند.
کاربردهای کنترل PID
کنترل کننده های PID در کاربردهای مختلفی مورد استفاده قرار میگیرند، از جمله:
- سیستمهای کنترل دما
- کنترل سرعت موتورها
- کنترل فرایند در کارخانههای شیمیایی
- رباتیک و اتوماسیون
- سیستمهای کنترل پرواز در هوافضا
توضیحات:
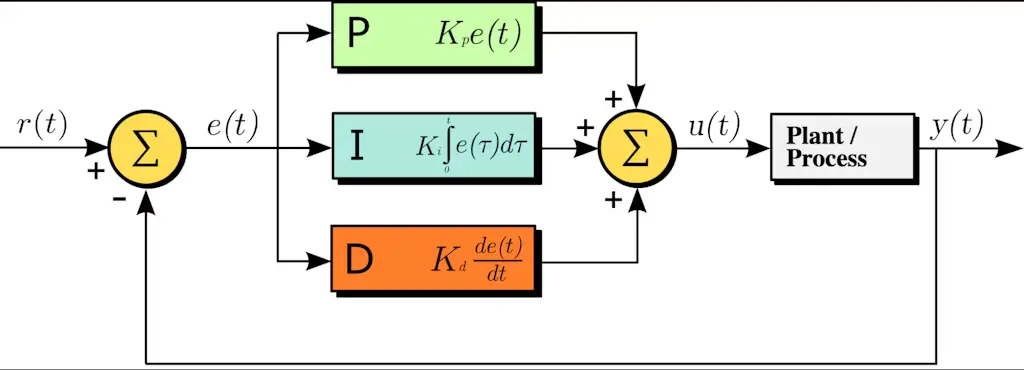
عملکرد PID بر اساس مقدار فعلی متغیر فرآیند (CV) که از سیگنال آنالوگ خارجی استخراج شده و مقدار تنظیمی فرآیند (SP) انجام میشود و محاسبات براساس فرمول PID انجام میگردد. نتیجه محاسبه، خروجی کنترل برای فرآیند کنترلشده است.
فرمول PID به شکل دیجیتال:
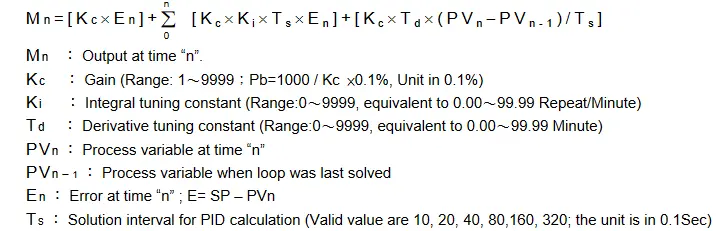
هر چه تنظیم بهره (Kc) بیشتر باشد، سهم تناسبی به خروجی بزرگتر میشود. این میتواند یک واکنش حساس و سریع کنترل را ایجاد کند. اما زمانی که بهره بیش از حد زیاد باشد، ممکن است نوسان ایجاد کند. بهتر است تلاش شود “Kc” تا حد ممکن بزرگتر شود (اما نه تا حد ایجاد نوسان)، که میتواند واکنش فرآیند را افزایش داده و خطای حالت پایدار را کاهش دهد.
آیتم انتگرالی برای از بین بردن خطای حالت پایدار استفاده میشود. هر چه مقدار (Ki، ثابت تنظیم انتگرالی، Ki=1/Ti) بیشتر باشد، سهم انتگرالی به خروجی بزرگتر خواهد بود. هنگامی که یک خطای حالت پایدار وجود دارد، “Ki” را بیشتر تنظیم کنید تا خطا کاهش یابد.
قسمت نرم افزار
با تنظیم پارامترهای PID، مهندسان میتوانند کنترل دقیق و پایداری از سیستمهای پیچیده داشته باشند، که این امر کنترل PID را به ابزاری اساسی در مهندسی کنترل مدرن تبدیل میکند.
ساختار:
- مقدار تنظیمشده: مقداری که میخواهیم خروجی را در ان مقدار ثابت نگه داریم.
- مقدار فعلی: مقداری که در خروجی داریم را نشان می دهد.
- خروجی: مقداری که مقدار خروجی را با ان تنظیم میکنیم .
- بهره تناسبی: ثابت تنظیم بهره (Kc)
- بهره انتگرالی: ثابت تنظیم انتگرالی (KI)
- بهره مشتقی: ثابت تنظیم مشتق (KD)
- نقطه تنظیم حداکثر: حداکثر مقدار تنظیم شده را مشخص میکند
- حداکثر خروجی: حداکثر مقداری که میتوانیم برای تنظیم خروجی به سیستم اعمال کنیم.
مثال:
اگر زمان نرخ ۱ دقیقه باشد، Td = 100؛ اگر زمان مشتقی ۲ دقیقه باشد، Td = 200. تنظیم صحیح پارامترهای PID میتواند نتایج عالی در کنترل دما به دست دهد.
پارامترهای پیشفرض:
- فاصله زمانی حل PID برابر با ۴ ثانیه (Ts= 40) است.
- مقدار پیشفرض بهره (Kc) برابر با 110 است، که Pb=1000/110×0.1%≒0.91% است؛ محدوده کامل سیستم 1638 درجه است، یعنی مقدار SP-14.8 درجه (1638×0.91≒14.8) باعث میشود عملیات PID وارد کنترل باند تناسبی شود.
- مقدار پیشفرض ثابت تنظیم انتگرالی 17 است.
- مقدار پیشفرض ثابت تنظیم مشتقی 50 است، یعنی زمان نرخ 0.5 دقیقه (Td= 50) است.
هنگام تغییر فاصله زمانی حل PID، ممکن است نیاز به تنظیم مجدد پارامترهای Kc، Ki، Td باشد.
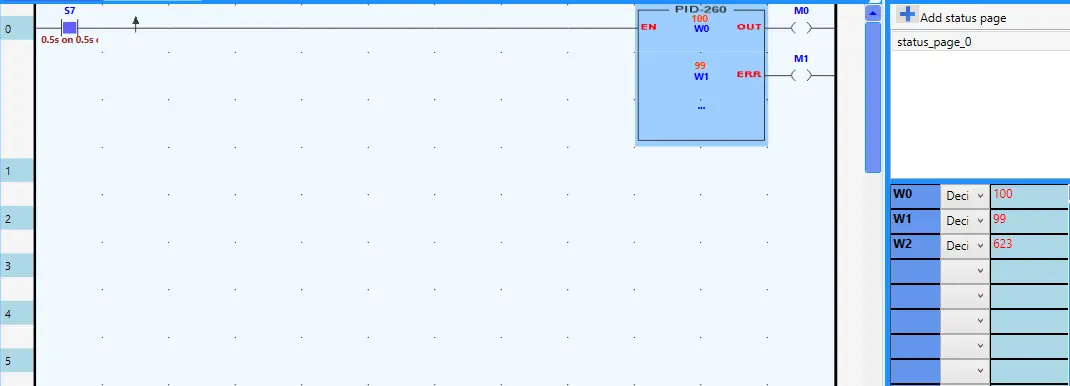
نمودار نردبانی مثال در شکل زیر نشان داده شده است.
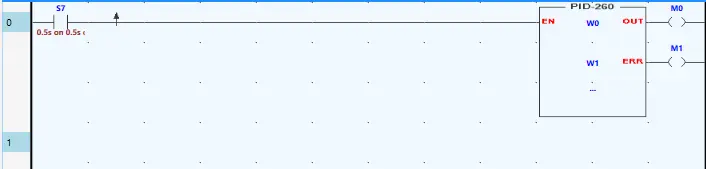
پارامترهای تابع به این شکل هستند :
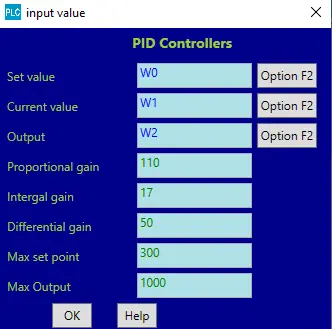
پس از شبیهسازی، اگر مقدار تنظیمشده (W0) بیشتر از مقدار فعلی (W1) باشد، خروجی افزایش مییابد و همچنین بخش خروجی حداکثر، حداکثر خروجی را مشخص میکند. اگر مقدار تنظیمشده (W0) کمتر از مقدار فعلی (W1) باشد، خروجی کاهش مییابد.