PID
کنترل کننده PID:
PID CONTROLLER (کنترلر پی ای دی) یک الگوریتم کنترلی متداول است که در کاربردهای صنعتی و اتوماسیون صنعتی استفاده می شود. بیش از ۹۵% از کنترل کنندههای صنعتی از نوع PID هستند. این کنترل کننده ها برای کنترل دقیق تر پارامترهای مختلف مورد استفاده قرار می گیرند. اغلب این روش برای تنظیم دما، فشار، سرعت، جریان و دیگر متغیرهای فرآیند استفاده می شوند.
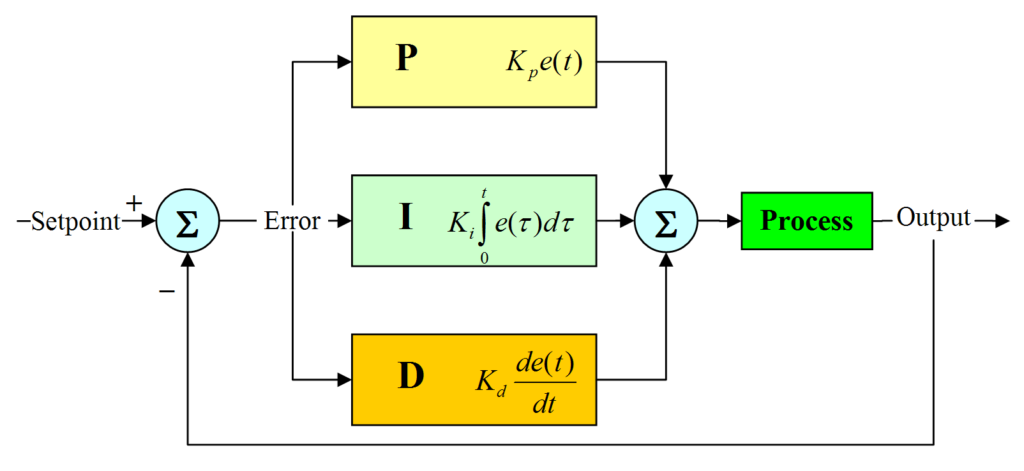
به خاطر عملکرد قوی و سادگی عملکرد، این روش توسط برنامه های بزرگ صنعتی پذیرفته شده اند. در آن کنترل دقیقتر خروجی ها مهم ترین نیاز است. ترکیبی از اعمال عملگرهای تناسبی، انتگرال گیر و مشتق گیر که بیشتر به عنوان عمل PID و از این رو به عنوان کنترلر انتگرالی(Integral) – مشتقی(Derivative) – تناسبی(Proportional) شناخته می شود.
این سه ضریب پایه در هر کنترلر پی آی دی برای کاربردهای خاص به منظور رسیدن به واکنش بهینه متغیر هستند.این کنترلر پارامتر ورودی را از سنسور که به عنوان متغیر فرآیند واقعی نامیده می شود، بدست می آورد. همچنین خروجی خواسته شده را می پذیرد، که به عنوان متغیر تنظیم نامیده می شود.سپس، آن را محاسبه و ترکیب تناسب، انتگرال و مشتق را برای محاسبه خروجی محرک، ترکیب می کند.
روش کار کنترلر PID:
فرض کنید که متغیر فرآیند، دما (سانتی گراد)است. برای اندازه گیری متغیر فرآیند (یعنی دما)، یک سنسور به کار می رود. فرض کنید که این فرآیند باید در ۸۰ درجه سانتی گراد حفظ شود، پس نقطه شروع 80 درجه سانتی گراد است. فرض کنید که دمای اندازه گیری شده از سنسور 50 درجه سانتی گراد است. اما نقطه تنظیم دما ۸۰ درجه سانتی گراد است.
این انحراف از مقدار واقعی از مقدار مورد نظر در الگوریتم کنترل پی آی دی منجر به تولید خروجی به محرک (در اینجا گرم کردن)بسته به ترکیب واکنش های تناسب، انتگرال و مشتق می شود.بنابراین، کنترلر PID به طور پیوسته خروجی را به محرک تا زمانی که متغیر فرآیند به مقدار تعیین شده برسد تغییر می دهد.در واقع به صورت یک سیستم حلقه بسته عمل می کند.
در کنترل دستی، اپراتور ممکن است به طور دورهای متغیر فرآیند (که باید تحت کنترل باشد مانند دما، جریان، سرعت و غیره)را بررسی کرده و متغیر کنترل را تنظیم کند.(که به منظور تغییر دادن محرک ها مانند یک عنصر گرمایشی، شیر جریان، ورودی موتور و… .) اما در کنترل خودکار، اندازه گیری و تنظیم به طور خودکار انجام می شوند.
کاربرد کنترلر PID:
تمام کنترل کنندههای صنعتی مدرن از نوع اتوماتیک (یا کنترل کننده های حلقه بسته)هستند. معمولا برای تولید بهینه یک یا ترکیبی از اقدامات کنترلی بر روی آنها انجام میشود.
اقدامات کنترلی عبارتند از
- روشن خاموش کردن کنترلر
- کنترل کننده تناسبی
- کنترل کننده تناسبی-انتگرالی
- کنترل کننده تناسبی-مشتقی
- کنترل کننده تناسبی-انتگرال-مشتق شده
در مورد کنترلر پی آی دی، دو حالت برای کنترل متغیر ممکن است. 1- زمانی که متغیر فرآیند کم تر از نقطه تنظیم باشد یا کاملا خاموش باشد.2- هنگامی که متغیر فرآیند بالاتر از نقطه شروع باشد.بنابراین، خروجی دارای نوسان در دو حالت خواهد بود. به منظور دستیابی به کنترل دقیقتر و عدم نوسانات، بیشتر صنایع از کنترل کننده PID (یا PI یا PD )استفاده می کنند.
اغلب کاربردهای این روش کنترل در پی ال سی ها (PLC) استفاده می شوند. بلوک های PID در درون پی ال سی ها هستند و گزینه های پیشرفته برای یک کنترل دقیق را ارایه می دهند.پی ال سی ها باهوش تر و قدرتمندتر از کنترل کننده های مستقل هستند و کار را آسان تر می کنند.هر پی ال سی دارای بلوک پی آی دی در نرم افزار برنامه نویسی خود می باشد.






